Introdução
Métodos
Dados
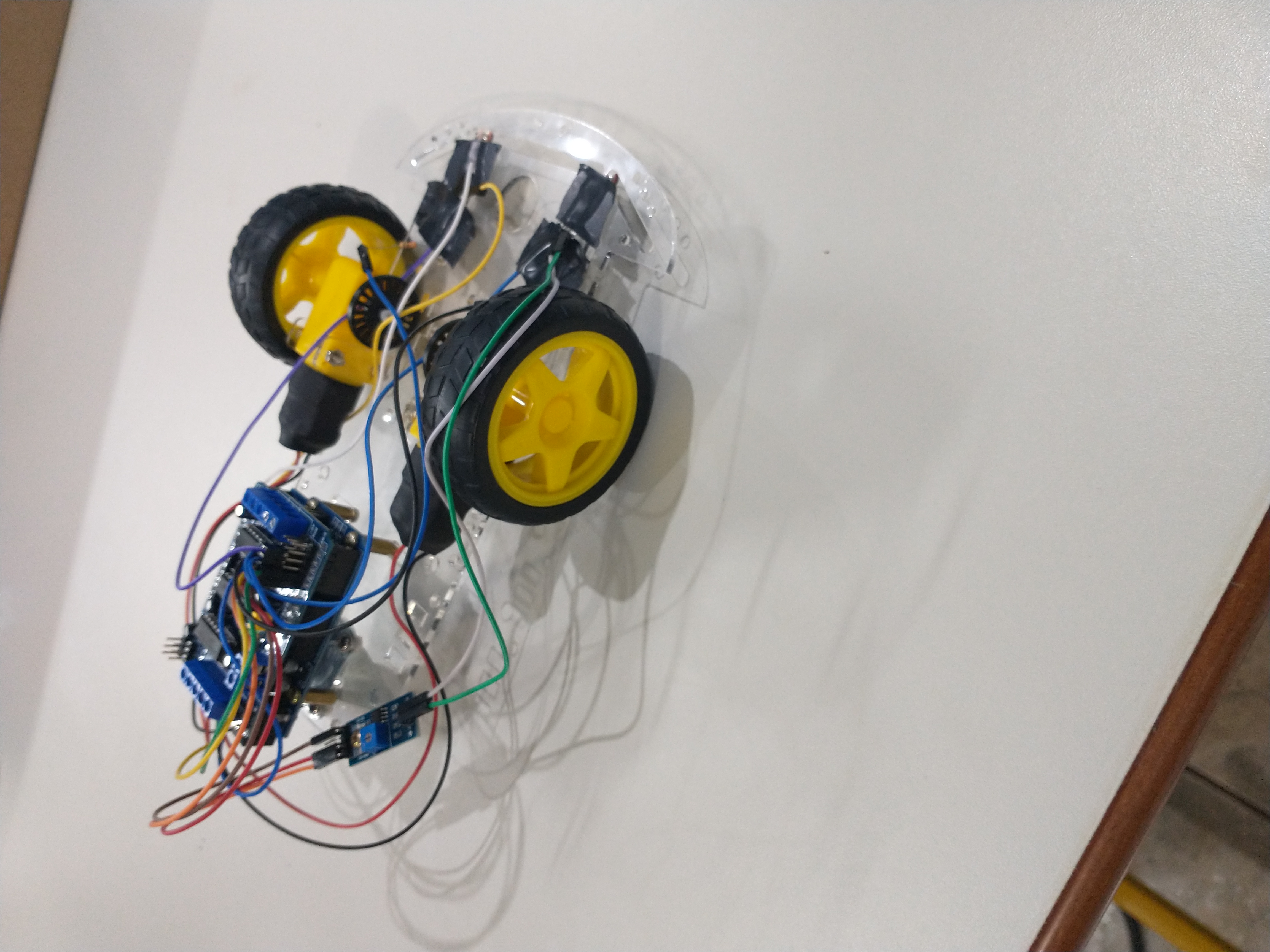
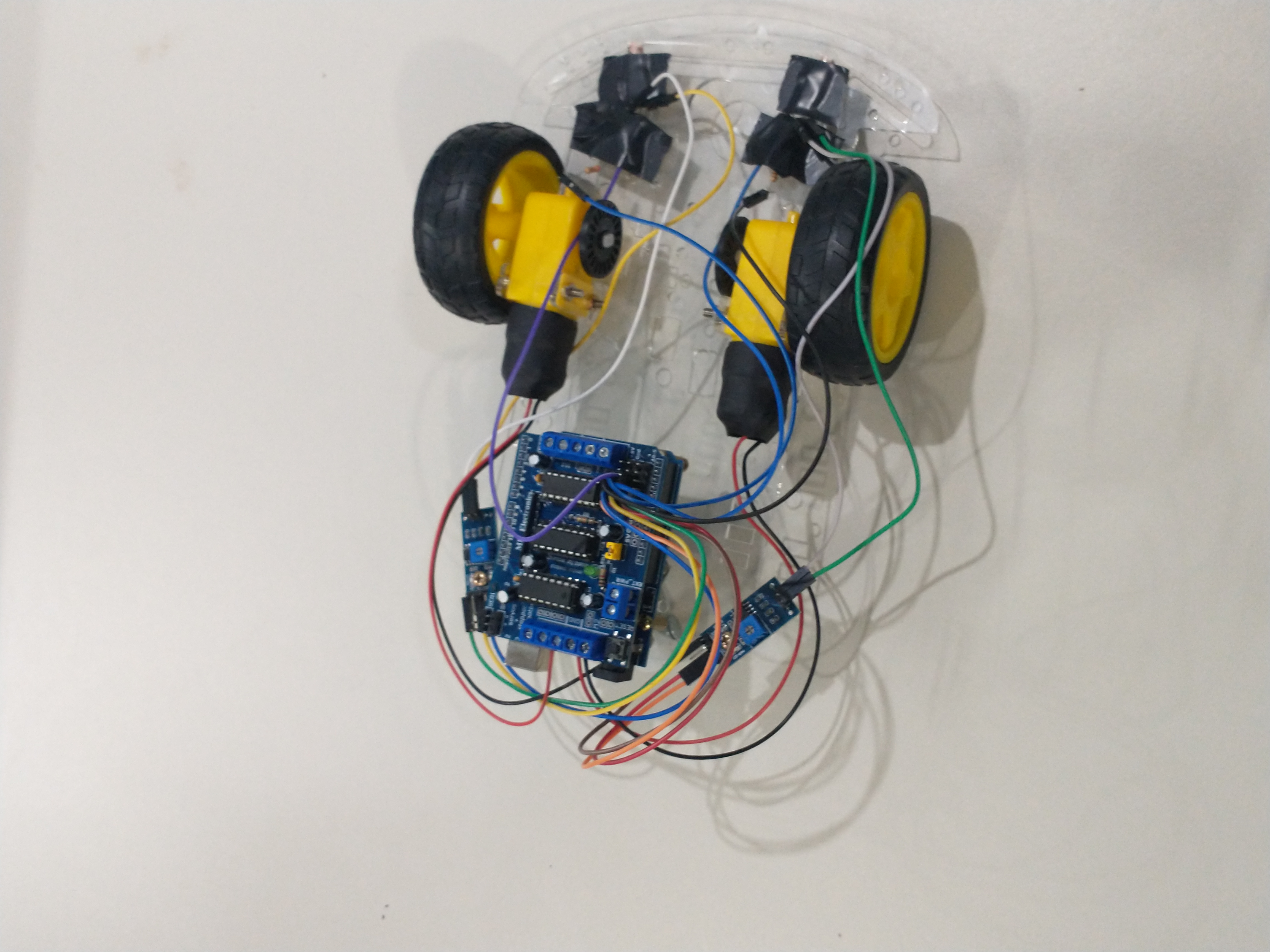
Uso da robótica para contribuir com o deslocamento dos deficientes visuais
Temas
Palavras-chave
Equipe Ciêntifica
Leonardo Gabriel Donadoni Franco (Coordenador da Equipe)
Karoline de Azevedo Ferreira Rodrigues (Professor Colaborador)
Eliane da SIlva Bonacin (Professor Colaborador)
Ludmila Negrão Hartt (Aluno Capitão)
Alice Alves Moreira (Aluno)
Escola
Resumo
Resultados
 0
0
Discussão dos Resultados
Conclusões
Referências
Fotos Vídeos